日志
RCJ第09次课
|
今天上课前,我将场地重新整理了一下,因为今天要让机器人跑一下实际的场地了!

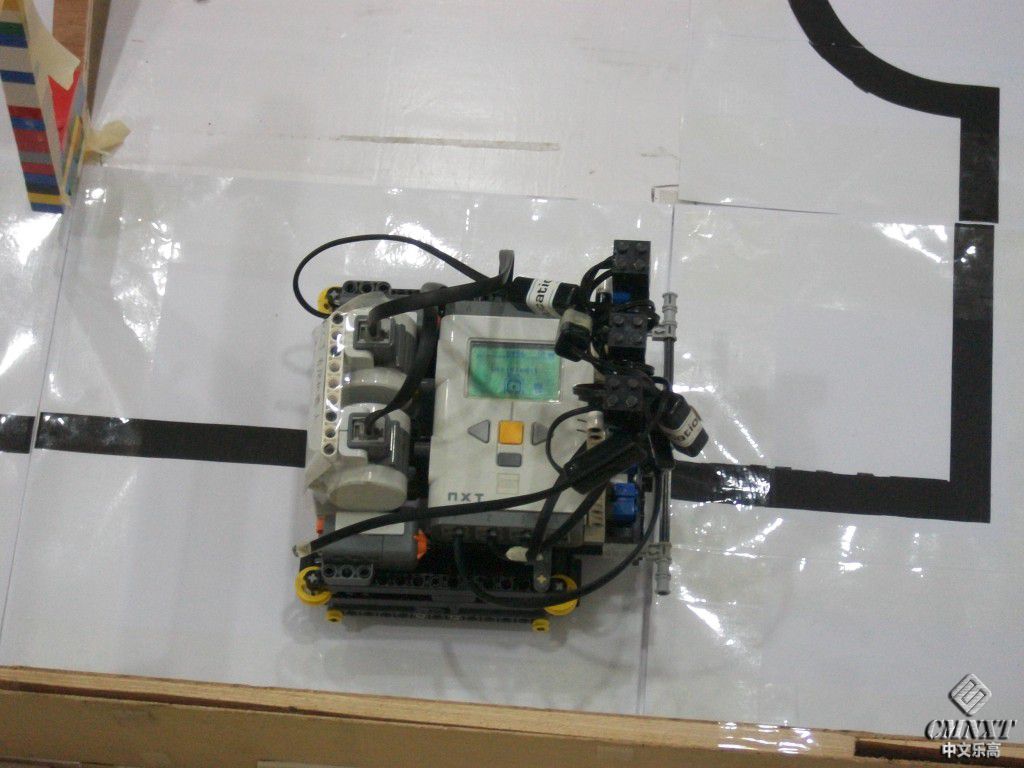







这个是今天的场地图,难度巨大……但其实主要目的是为了让俞沐开试验断线该如何处理,所以设计了这样的场地
上周俞沐开的机器人是这样子的!很小巧,结构特别紧凑
看看以前的就可以知道差多远了
从今天开始,两人又开始合作了~俞沐开现在专门把程序研究清楚,该如何巡线才能稳定,因为断线实在太有难度了
PS:研究人员需要一个安静的区域……(不是回避他,而是为了让他更专心)
汪运洲开始把俞沐开的机器人完善了,首先需要COPY一份机器人出来
现在在思考如何抓罐子了~他们想先把罐子(人质)抓住,然后再送到安全区域
汪运洲根据今年WRO收乒乓球的方法,来“收”罐子!非常有创意的一个设计!好像我还没见过哪个队伍这么做过的!
因为安装的单位很古怪,所以怎么安装电机也是思考了很久的一个问题。
最后这个安装方法因为无法联动,被否决了……
然后是用了一个更简单的方法安装~不过忘记拍照片了= =。。。
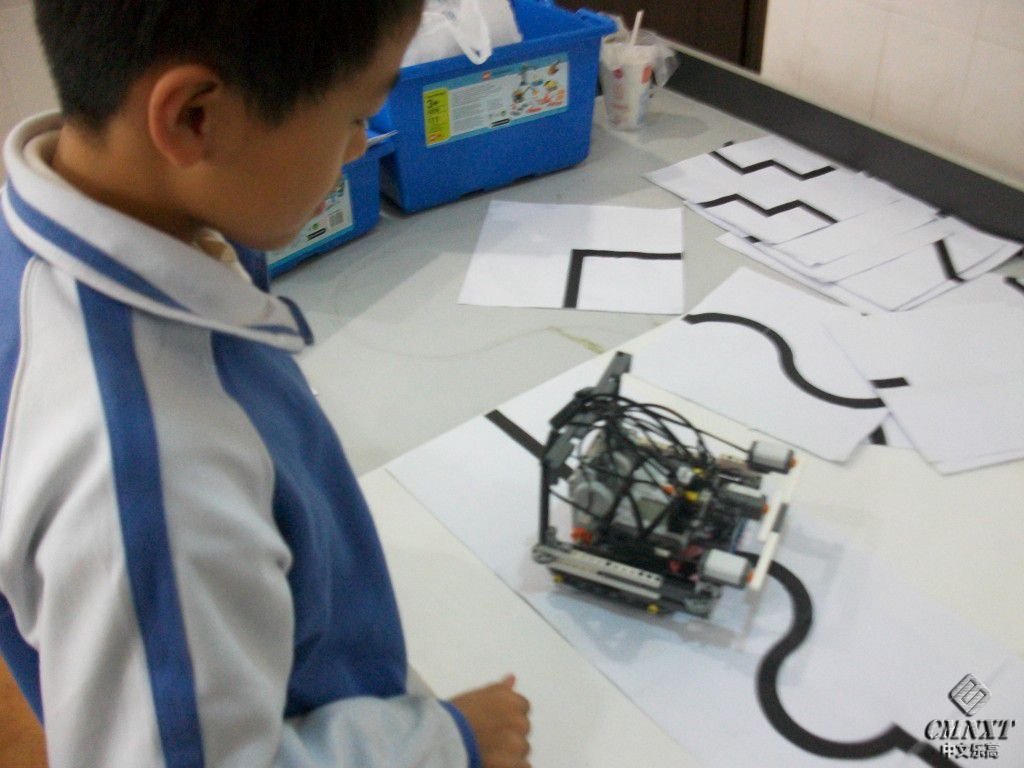
最后。。放送一段俞沐开编程时候的样子= =。。
你见过编程这么活跃的学生么……
不过编完后发现哪里设置错了……没拍到运行的样子……
今天汪运洲做出来的效果很成功!不过也是忘记拍视频……接下来需要让他把秘密武器安装在机器人上面了!
俞沐开今天程序试验了很多方法,但还是不能过断线,所以也是尝试了一个全新的方法,但是程序比较复杂,逻辑关系还没理清楚,期待下次编程,看看会变成怎样呢?





全部作者的其他最新日志
- • 狂赞FTC比赛组委会(仅限上海赛区)
- • 有些事已不愿干涉
- • 旧企划-w-...
- • 新企划!自作jubeat
- • 初衷都是好的
- • 默契的搭档
