本帖最后由 小竹砸 于 2021-8-14 19:41 编辑
感谢提供问题和提供讲解链接的所有老师,如果觉得内容部分,欢迎分享到更多的群和社区中,帮助更多老师成长。 一、EV3部分 (一)软件安装及基础操作 1、安装包(EV3、studio…)哪里有? 提取码:IEV3
(包含studio,未截进去)
2、安装软件怎么报错了? 未卸载干净之前的版本,下面两个都卸载完成再安装。 
3、怎么我的太空挑战拓展安装以后,还是没有? 先卸载软件,重新安装软件时选择默认路径,然后再安装拓展包。
4、下载线插上了,为什么不显示主机名称? 插对了吗?开机了吗?电脑反应过来了吗?
5、这个模块哪里来的?这个参数是什么?怎么做的? 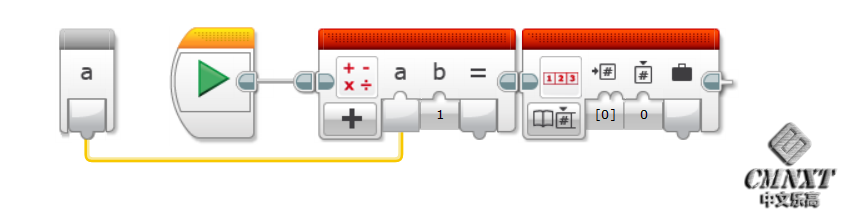 
最后一个抽屉下的模块是“我的模块”,需要自己手动创建,具体可以看
6、程序块死机了怎么办? 长按返回键+确认键;直接扣电池最快了
7、ev3主机开机橙灯怎么回事? 没电了。
8、如何升级固件?失败了怎么办? 使用USB线连接主机和电脑,然后单击“工具”——“固件升级”,选择你要更新的固件版本,升级即可。升级过程中,不要动下载线和主机,接触不良会失败。 万一失败你会看到下面这个界面。 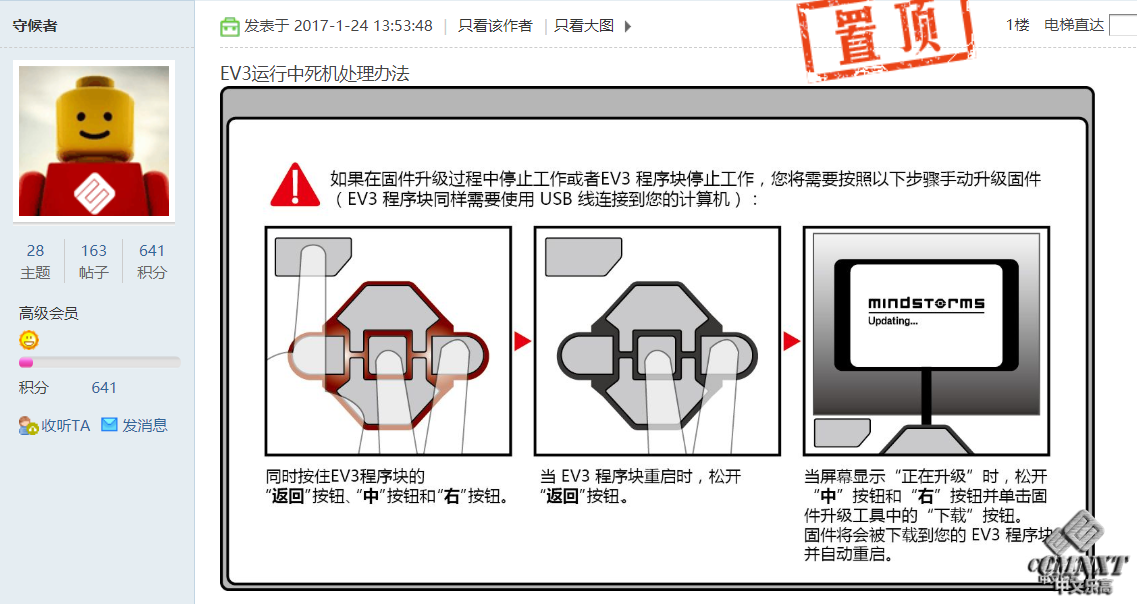
9、平板怎么连接EV3?没有看到USB接口啊。 通过蓝牙连接。
10、怎么拖拽不了模块?怎么不能修改参数? 拖拽不了模块是因为你进入了平移模式,点击选择工具,再试试 
不能修改参数,多半是选中了好几个模块。
11、平衡小子(其他官方模型)的图纸和程序,谁可以分享一下? 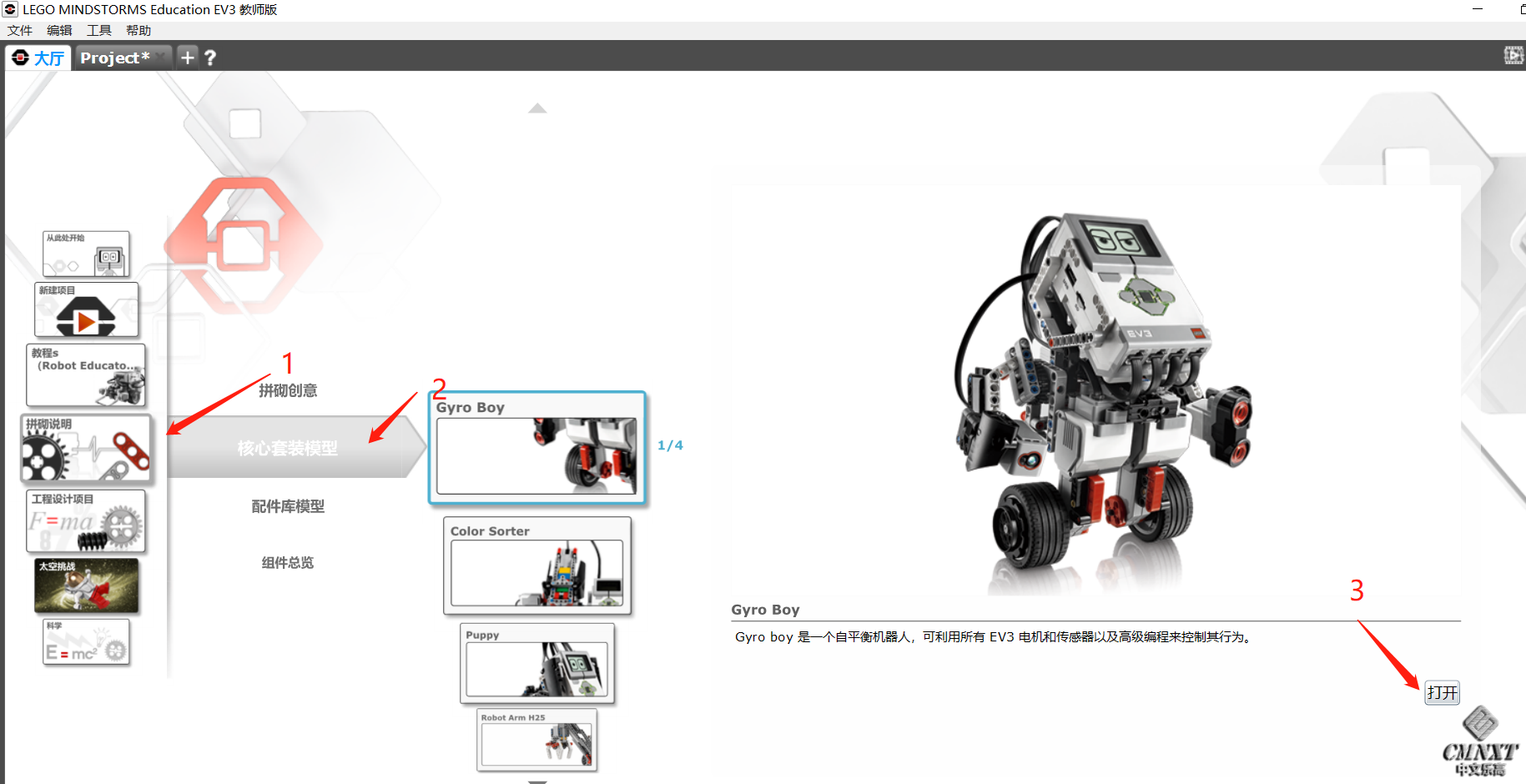
12、我的颜色传感器怎么灰度值超过100了? 重置操作试试(我没遇到过)。 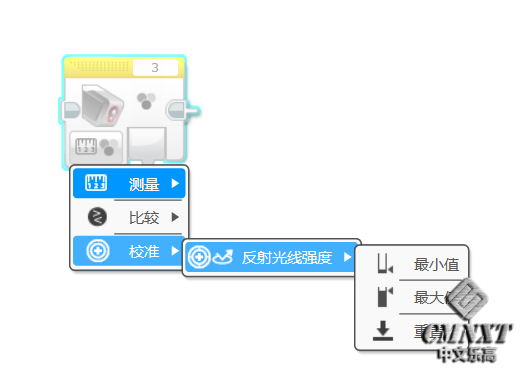
13、怎么删除子程序、变量、自定义模块? 需要删除的子程序,选中以后点下面的删除,就能完成,图像、声音、我的模块、变量的操作一样。 

14、一不小心关掉了子程序,怎么重新打开? 关掉了的程序,在上图那个界面里,点击对应程序名称可以打开。
15、怎么删除主机里面的程序高效点? 升级固件,所有东西都会清空(程序、连接记录、设置等);日常上课可以让孩子保存项目名为“1”,后面下载直接会把这个替换掉,这样里面始终只有一个项目,不需要定期删除了。 注意:比赛程序,不要这么操作!!
(二)蓝牙相关 16、笔记本连接不了EV3蓝牙怎么办? a:根本搜索不到主机蓝牙 打开主机蓝牙,设置好,再搜索。如果蓝牙打开了还是搜索不到,重启主机,还是不行就试试别的电脑,如果同样配置,只是个别电脑不行,考虑换系统;如果有的配置的电脑可以连上,有的连不上,建议给配置较低的电脑买蓝牙适配器(具体去某宝搜) b:能够显示主机名称,但是连接就报错,就按照下面的操作: 根据弹窗内容检查主机里的蓝牙设置。 c、主机名称可以显示,设置也是正确的,就是连接不上! 删除主机里和电脑里的蓝牙连接记录,然后再连接 注意:如果怎么着都不行,还是用下载线吧!何必执着?
17、一堆主机做匹配,主机蓝牙搜索出来的主机名称都是乱码,有些主机并没有显示出来,怎么处理? 名字乱码没有关系,随便选择一个进行匹配,被选中的主机会有连接弹窗,匹配好了的就关掉,剩下的一对对地处理。 如果有些主机显示不了其他主机的名称,排除基础设置问题后,通过能够显示的主机去匹配没显示的主机。
18、一个主机的蓝牙如何连接到另一个? 搜索、然后匹配,详细操作见《中文用户使用指南》(公众号后台,发送关键字“中文指南”获取) 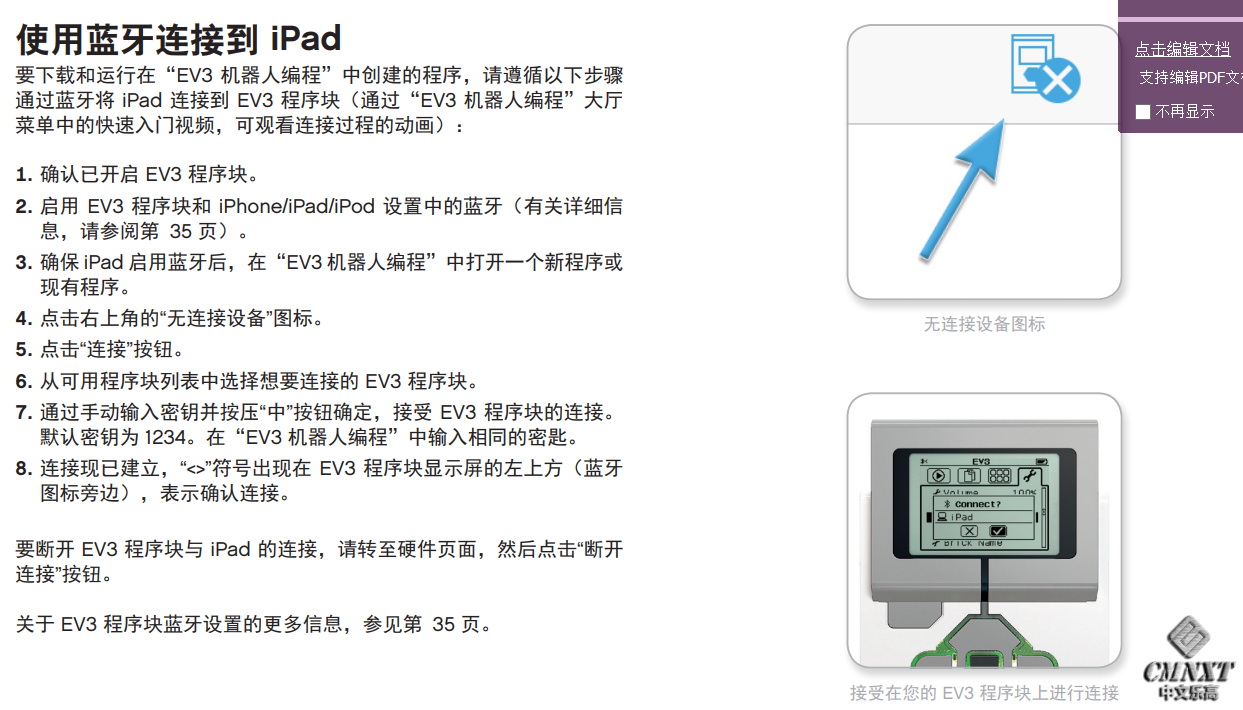
19、EV3蓝牙课,每次匹配都花好长时间? 初次匹配完成后,主机上面对应贴标签,一组贴字母a、b、c、d,一组贴1、2、3、4,匹配成功过,后面只要不升级固件和删除记录就不需要重新匹配。
20、一个主机怎么控制另一个主机? 进行蓝牙匹配后,高级模块中的消息传递可以在主机之间传递数据。
21、EV3蓝牙模块怎么自动连接? 进行过匹配的两个主机,可以通过高级-蓝牙连接模块进行蓝牙的开启、关系、创建连接等操作。 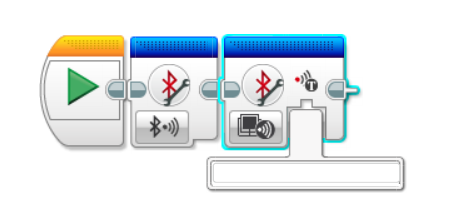
(上图是未连接主机情况下的截图,连接主机后,框子中可以显示匹配过的设备,点选即可)
(三)程序问题 ——电机控制—— 22、写的是左转,为什么车子往右转? 指令上的端口顺序和接线情况并不匹配(比如,移动转向上是B+C,实际连接时左边C,右边B),修改端口或者直接交换左右电机的接口可以解决。
23、写的是后退/负功率,为什么它前进? 功率的正负只是决定电机正转还是反转,和前进后退并不直接对应,前进还是后退,取决于电机的安装方向,传动关系等。 注意:如果是中型电机,直行时左右两侧功率需要相反(具体请自测)
24、车子巡线的时候,在原地摆动,不前进怎么处理? 两侧轮子的功率设置成相反数了,旋转中心在车体中轴线上,没有前进的速度分量,需要修改电机功率。
25、未校准电机和普通电机有啥区别?(建议自测) 未校准电机:遇到阻碍,自动停转。 普通电机:遇到阻碍会加大功率转
26、控制车体转弯(直行)一定幅度,怎么总是多一点?用陀螺仪控制转弯幅度,它却一直转不停。 车体运动到指定幅度后,确实执行了停止,但是会因为具有惯性而继续小浮动运动一会儿,可以通过改变转弯方式(先快速,再慢速,或者跟目标角度差值成比例的速度),调整参数(改小一点电机转动角度,使用陀螺仪控制的话,改小一点陀螺仪的参数)进行优化。 注意陀螺仪等待模块设置时的模式选择,如果涉及多次用同一段程序转弯,可以选择更改中的任意模式。(为什么不用0增加、1减少?为什么不跟固定的值比较?) 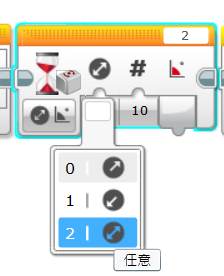
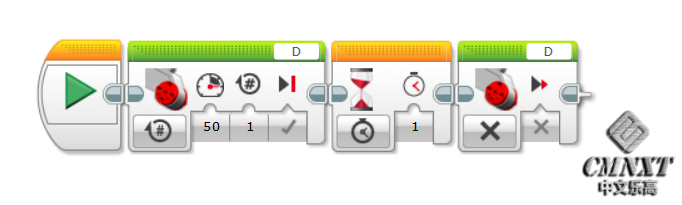
27、想用电机做个操纵杆,但是运行一段程序以后以后电机扭不动了,怎么办? 电机处于制动模式下(结束时制动为真,是制动模式),会锁死。 结束时制动可以设定为假(惯性滑行模式),如果想停准以后再扭动,可以先设定为真,等待一会儿(停稳),再加个结束时制动为假 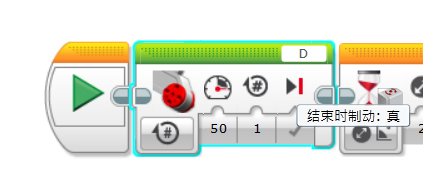
28、功率一样,车子怎么老走不直? 移动转向模块的转向值是用来控制转弯幅度和转弯方向的,转向度为50时,C端口功率会为0(转向值为-100,-50,0,50,100是特殊值,具体效果自测) 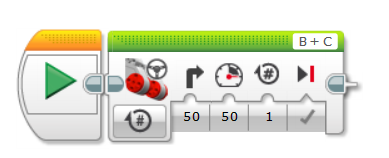
(是这么写的?) 换成移动槽模块,还是走不直? 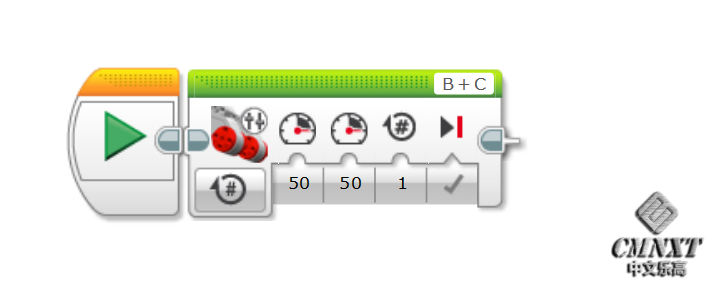
看看其中一侧的电机是否正常转动,重量分布是否均匀,是否有结构/水晶头线影响车轮的转动? 如果对于对于直线的效果要求比较高,可以使用陀螺仪传感器控制车体走直线(具体可以去“中文乐高论坛”搜索)
29、为什么不是功率越大,速度越快? 电机功率和电机转速在一定范围内是正比关系(大致范围是-85~85),剩余的范围内功率变化,转速基本不变
30、如何控制两个电机同步转动(转动其中一个,另一个跟着转动同样的方向和角度)? 简单说,就是转动的这个电机当前角度是另一个电机接下来需要转动到的位置,计算转动电机(电机C)的角度和需要同步的电机(电机B)的角度的差值,利用差值控制需要同步的电机就可以了。 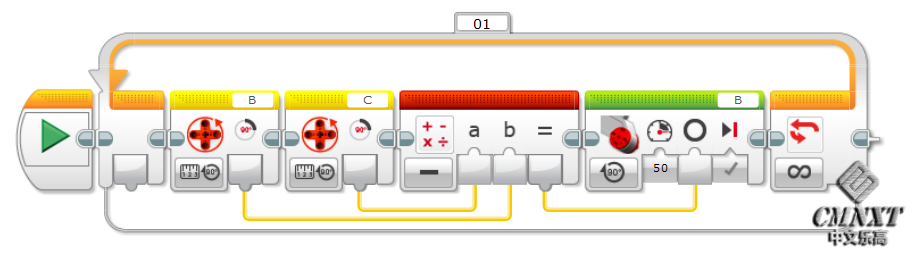
你会发现不动的时候,B出现抖动,这是因为B电机难以刚好转动差值对应的角度,可以如何解决?(解决思路参考:误差设置一个范围判定,大于一定范围B再转动;让B的功率和差值之间建立比例关系)
31、车子巡线到路口怎么没有停下来? 检查方向,巡线的循环成功结束了吗?循环结束以后你让电机停止了吗? 不知道怎么判定路口?
32、写了直行/转弯(开启模式)为什么不直行? 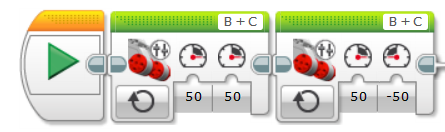
开启模式会让电池持续运转直到运行电机停止指令或者程序结束,不会阻碍程序的运行,会直接运行后一个指令。(这个问题超级常见) 上面的程序不会执行也不会转弯,第一个直行模块运行一瞬间(时间非常短)马上进入后面的转弯模块,转弯模块后面没有指令,程序结束,电机停止转动。(有时候能抖一下)
——传感器相关—— 33、我的光感插了线,但是灯不亮/运行程序过程中熄灭? 灯不亮,线没插紧或者插错端口了;过程中熄灭,换线试试,或者检查下自己的程序。
34、我没动,陀螺仪的度数为什么一直在变化? 零漂了,拔线静止3-5秒,然后插线。
35、没有障碍物/距离障碍物很近时,超声波的数值怎么是255? 超声波测距是通过计算发射超声波和收到反射回来的超声波之间的时间间隔来测距的,在距离小于3cm(距离障碍物很近)或者不低于255cm时,会显示255。 超声波不是定向线性发射的,会向周围扩散,所以使用超声波传感器测距离时除了注意前方的障碍,还得跟下平面有一定高度。 当然如果,竖起来之后看天花板,还是255cm,可以去修一下了。
——流程及算法—— 36、只有用PID写的巡线程序才是最快的吗? 并不是,切换也可以很快,并且参数更好调;针对不同的场地而言,合适的、自己可以把控好的才是快的。
37、循环末尾设置了跳出循环,怎么运行的时候不会跳出/跳出很迟钝? 循环末尾跳出循环,只有在循环体(循环内的全部指令)刚好执行完成时才会进行跳出判定,所以循环内的程序执行一次的时间比较长时,不能非常灵敏地跳出循环。可以通过并行相应的条件跳出指定的循环。 
38、跳出循环了/主体程序结束了,车体为什么不停止? 不要把循环结束和停止划上等号,只有程序执行完或者运行电机停止指令车体才会停止。想在循环结束时停车,可以在循环末尾加个停止模块。 主体程序结束了,车体还不停止是因为配合用来跳循环的并行的程序没有结束。
建议:养成习惯,满足一回的用等待跳;持续用来判断的,末尾跳;分段判断的,分段跳(主循环结束以后,跳出并行的循环)。当然最简单的方法是主体程序末尾加停止程序。
39、数值连接到显示模块上了,为什么不能显示?
数值显示应该以文本的形式显示,图像模式适合输入文件名显示指定的图像(也可以直接选择),不能直接连数据线进行数据显示。
40、按键切换测量模式下控制车体运动,怎么没按也在动? 使用切换测量模式时,前面有小黑点的分支会默认执行(当其他分支的条件不满足时,都会执行这条分支里的程序),如果切换情况没有全部列举完,需要注意小黑点的处理。
41、用了变量统计数值,但是数值始终是1,什么问题? 变量读取的是最近一次写入的值,想实现累计需要将上一次计算的结果写入,下次计算的时候先读取上次写入的内容。 所以,下面哪个程序可以计数? 
42、循环里面可以写并行程序吗? 可以,但是并行程序最好不要过长,因为想要进入下一次循环需要并行程序中的直行也执行完成。
43、怎么让电机转动到卡住的时候停止? 使用未校准电机模块;角度侦测比对(一定时间间隔里,电机角度变化小于一定值);额外装传感器辅助检测;测量功率跟设定的功率比对(不是比较是否相等,而是差值是不是在一定范围外)
44、启动程序以后,用手转动电机,编写反转同样的角度,电机不回到原位置? 回到原位置前,加个电机停止试试。
45、如何生成一位小数? EV3中的随机模块不论上限、下限如何设定,只会输出整数,不过你可以通过运算得到小数。
46、如何不重复地随机输出数值?
47、我按了一下触动,怎么计数/变化/响了好几次? 你按了一次,在你按下的时间内,计数程序不止运行了一遍。可以将计数条件触动按压改为碰撞,个别传感器改动以后还是会出现这个问题,把碰撞拆成按下+等待短时间+松开就能解决。
48、我的碰碰车程序,写的是碰撞之后停车后退,然后转弯,为什么碰到障碍不停车,还在往前冲? 按下之后松开算完成一次碰撞,才会触发碰撞等待的后续指令,碰到障碍只能满足的条件按下,需要修改等待条件为按下。 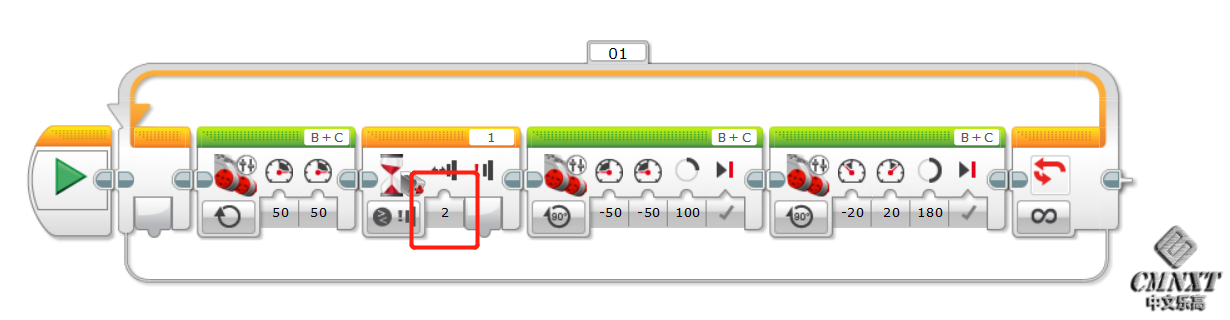
——其他内容—— 49、为什么我下载程序的时候,编程画布上的端口有感叹号? 模块中的端口和实际连接的端口不对应。
50、程序运行了,为什么灯一直闪烁,车子不动? 你看看程序中对应的端口对不对。
51、下载完程序以后,怎么点击了运行不了? 你的电机开启加循环了吗?切换加循环了吗?等待条件怕不是一瞬间就能满足吧?加了开始吗?一运行循环就跳了?
52、程序一运行就报错了,怎么回事? 常见的错误是:列表溢出(比如:长度为3,你读到了索引3),创建蓝牙连接错误(比如:自己连接自己)
53、程序下载报错,怎么处理? 常见报错有:切换测量模式下有非默认的分支,没有写明条件或者条件重叠;我的模块从项目中删除了,但是程序中并没有删除完;主机内存满了( 刷固件删程序吧)。
54、显示文本时,坐标设置正确,文本并非空白,为什么不显示内容?为什么显示内容不完整? 坐标过大或者过小,导致在该坐标位置不能完整显示文本中的第一个字符,会出现不显示任何内容的情况;如果至少能完整显示一个字符,但是不能全部显示就会出现显示不完整 这两种情况都需要调整坐标。 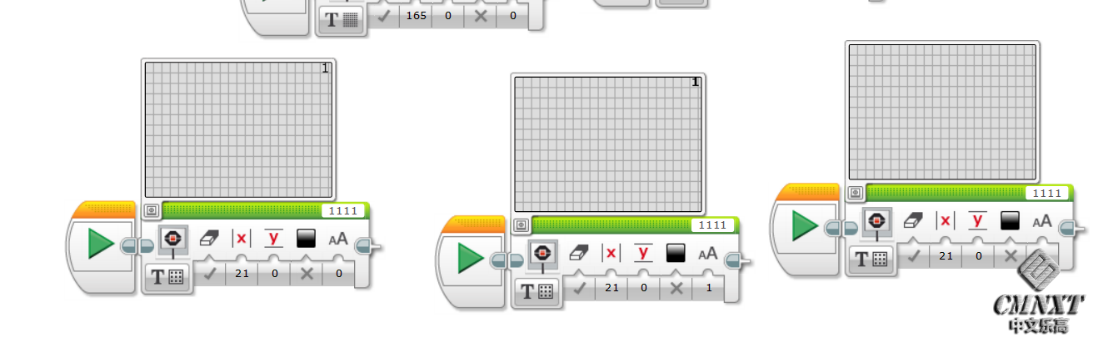
(虽然坐标范围是(0~177和0~127)实际上坐标为负值也能显示,具体效果和范围自己测试)
二、Wedo部分 55、怎么老亮黄灯? 大概率电量不足,如果同样的电池,只有个别集线器亮黄灯,考虑送修。
56、改变速度或者方向的时候,电机老是会按照之前的状态动一下,怎么解决? 1.93版本,可以通过先速度0、方向、速度、时间来解决摆头问题 1.938版本就跟软件里的教程匹配 1.97和孩子解释工作量比较大
57、连接了多个电机,怎么单独控制? 长按电机模块,可以进行标记;使用多个电机时,只要未进行标记的电机模块运行时就会控制所有连接的电机。
58、wedo怎么做单光感巡线? 运动传感器距离地面足够近时,可以通过运动传感器返回的值区分桌面和黑线,配个能单马达直行和转向的车体就好了。车体参考去中文乐高论坛看帖复刻。
59、华为设备连接不了wedo?wedo在安卓手机/平板上怎么安装? 60、作品带有传感器,程序是对的,但是运行效果有问题? 程序确实没问题的话,那就是操作的问题,比如:避障车先挥了手,然后再运行程序!
三、Scratch部分 61、如何生成一位小数? 字符串拼接,整数+小数点+一位整数。
62、删除模块以后,为什么不能输入\改写参数? 这是bug,常在批量删除指令后出现,点击软件界面外的任何区域即可,或者切出去(Alt+Tab)又切回来。
63、如果制作移动的“背景”? 64、改变了画笔颜色,怎么图章的角色颜色还是不变? 画笔颜色影响的是画笔后续移动过程中留下的轨迹的颜色;图章是将角色当前造型印在舞台上,所以图章的效果跟造型有关跟画笔颜色无关,可以在改变角色的颜色特效后,再运行图章指令。
65、画笔使用过程中怎么有多余的笔迹? 因为移动过程中,笔是落下的状态;试试每次先抬笔、再移动到想落笔的位置,然后再落笔、移动。
66、Scratch中的列表可以如何应用? 有序地存一堆数据,常用来排序、抽选数据、大量地记录数据。
67、克隆体怎么分别控制? 克隆体继承了本体的所有未处于运行状态下的脚本,可以使用私有变量(创建变量时选择仅适用于当前角色)进行标记,达到分别控制的效果。 68、子弹打一会儿就不能发射了,怎么回事? 同时存在的克隆体数量存在上限(一般300+),需要及时删除克隆体。
69、子弹打中了敌人,敌人怎么不消失/分数为什么没增加? 你让子弹先消失了吧,加个等待试试。
70、子弹发射效果如何优化(比如:我想子弹从炮口前一定距离位置出现)? 如果发射角色是活动的,本体先移动到发射体的位置上并隐藏,克隆后,克隆体先移动一定距离后再显示出来即可。
71、边移动、边射击,怎么做? 本体始终移动到发射角色的位置上。
四、其它问题 72、这个零件编号是多少? 模型文件里面找,或者 淘宝找卖零件的客服咨询,他们会给你发链接的,链接里面一定有名称和编号,一定会有! 如果有实物的话,零件上面仔细看,其实也有编号的。
73、怎么画模型、做图纸? 画模型和图纸常用的有: 小颗粒——LDD和Studio, 大颗粒——LDCad(也可以画小颗粒,不过除了皮筋和线相关的非用不可之外,基本使用studio画模型做图纸)
74、LDD有中文版吗?Studio有吗? LDD有,Studio没有。
75、LDD怎么连接齿轮、履带?
76、魔方机器人老是报错,怎么处理? 中文乐高论坛有详细的,去你看吧!
77、EV3怎样用Python编程?
78、studio画图中马达十字孔无法旋转?橡皮筋和线怎么画? 马达十字孔确实无法旋转,两个办法解决: a、做马达相关模型时,关掉冲突检测。
b、调整其他轴的方向,让马达孔不需要转动也能刚好咬合。
79、模型中的橡皮筋和线怎么画? 橡皮筋和线可以在Ldcad中画,Studio画不了。
| 
 IP卡
IP卡 狗仔卡
狗仔卡 发表于 2021-8-14 19:36:33
发表于 2021-8-14 19:36:33



 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 变色卡
变色卡 千斤顶
千斤顶 显身卡
显身卡